


آشنایی با سیستم FADEC
سیستم کنترل دیجیتال تمام خودکار موتور یا Full Authority Digital Engine Control که در صنعت هوانوردی با نام اختصاری FADEC شناخته میشود یک سیستم کامپیوتری و الکترونیکی است که تمام جنبههای عملکرد موتور هواپیما را کنترل میکند و اطلاعات موتور را برای مانیتور کردن و نظارت فراهم میآورد.
FADECجایگزینی است برای سیستم هیدرومکانیکی که در موتورهای توربینی قدیمی استفاده میشد و در حقیقت سیستمی است که موتور هواپیما را به صورت خودکار کنترل می کند. اولین استفاده از FADEC به جنگ جهانی دوم بر روی موتور پیستونی BMW 801 توسط آلمانیها باز میگردد و در ادامه میتوان شکوفایی این سیستم را بر روی موتور Rolls-Royce Snecma Olympus 593 در هواپیمای مافوق صوت کنکورد مشاهده کرد.
سیستم فدک برای زمان بندی دستورات مورد نیاز موتور، کنترل نیروی رانش و بهبود عملکرد کلی آن طراحی شده است. فدک تمام فعالیتهای موتور و هواپیما را به صورت یکپارچه کنترل میکند. در هر موتور سیستم فدک شامل دو دستگاه کنترل الکترونیک (ECU) میباشد، در حقیقت ECU کامپیوتر سیستم فدک است.
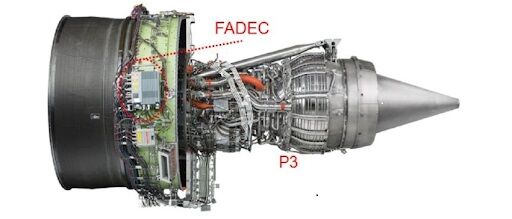
FADECروی بدنه فن موتور قرار میگیرد که این مکان به دلیل خنکی و دور بودن از گازهای گرم و پرفشار موتور محل مناسبی برای قرار گیری این قطعه مهم میباشد.
سیستم FADEC عملکرد موتور را به صورت کلی در موارد زیر کنترل میکند:
- کنترل و مدیریت نیروی خروجی موتور با توجه به دمای هوای محیط، فشار بیرونی، ارتفاع و ... که بر اساس دو حالت، میزان نیروی خروجی را کنترل میکند. یک حالت دستی با توجه به میزان نیرویی که ما از طریق اهرم پیشران به آن وارد میکنیم (Throttle Lever Angel (TLA)) و در حالت دوم که از طریق سیستم پرواز خودکار (Automatic Flight Control System(AFS)) و عملکردی که به آن داده شده است تنظیمات مورد نظر را به آنها اعمال میکند.
- کنترل دریچههای متغیر هوای فشرده (VBVs)
- کنترل میزان تغییر حالت پرههای ثابت موتور (VSVs) با توجه به حجم و سرعت هوای ورودی به دهانه ورودی موتور و کمپرسور جهت جلوگیری از استال کامل موتور.
- کنترل تنظیم مقدار سوخت، میزان و مدل پاشش آن، جریان سوخت در لولههای منتهی به محفظه احتراق، فشار سوخت و کنترل دریچههای بازگشت سوخت (FRV).
- کنترل فاصله بین لبه تیغههای توربین پرفشار و کم فشار با پوسته توربین در قسمت انتهایی موتور (HPTACC-LPTACC)
عملکرد یکپارچه بین موتور و هواپیما که توسط FADEC کنترل میشود شامل موارد زیر هستند:
- نشان دهندههای موتور که در کابین خلبان قرار دارند.
- اطلاعات تعمیر و نگهداری موتور که شامل چرخههای تعمیراتی، ساعات پروازی، یافتن خطاهای احتمالی موتور و مشخص کردن آنها برای تکنسینهای فنی که بتوانند تعمیرات لازم را انجام دهند.
- استارت خودکار و دستی موتور از طریق ترتیب دهی به وقایع رخ دادن استارت با پایش نشان دهندههای N1، N2 و دمای گازهای خروجی و همچنین بررسی پارامترهای احیای موتور که در صورت کامل نشدن استارت یا خفه شدن موتور آن را کنترل کند.
- کنترل پیشران معکوس (Thrust Reverse) برای نگه داشتن هواپیما در روی زمین با بررسی دقیق برخورد چرخها با زمین و شروع فرآیند پیشران معکوس بدون ایجاد مشکل در این فرآیند.
- کنترل پیشران خودکار از طریق بررسی پارامترهای N1، N2،EGT و جلوگیری از حالتی که موتور و شفتهای پرفشار و کم فشار از محدوده سرعتی و قدرتی خود خارج نشوند.
نیروی مورد نیاز برای ECU در هنگامی که نیروی موتور شماره دو بیشتر از 15% شود توسط یک آهنربای دائمی سه فاز نوسانگر تامین میشود. نوسانگر کنترل کننده نیروی مورد نیاز فدک به صورتی بهینه شده است که بسته به نیروی رسیده شده به هر دو ECU میزان انرژی مورد نیاز آن را کنترل میکند.
معماری سیستم فدک به این صورت است که تمام این سیستم جهت اطمینان از کارکرد صحیح و ایده آل آن توسط دو ECU کنترل و بررسی میشوند. به طور کلی در این سیستم همواره دو ورودی و دو خروجی وجود دارد. هر ECU شامل دو کانال A و B است که این دو کانال توانایی کنترل اجزای مختلف موتور به صورت جداگانه را دارند که به صورت خودکار بین هر دو کانال برای جلوگیری از رخ دادن خطاهای احتمالی میتوانند جابهجا شوند.
در سیستم فدک تمام ورودیها دوتایی هستند به جز بعضی از پارامترهای ورودی ثانویه که برای پایش و نشان دادن سیگنالها استفاده میشوند که تکی میباشند. برای بالابردن درصد اطمینان این سیستم در یک ECU پارامترها بین کانالهای همان ECU به صورت تقاطعی با یکدیگر جابهجا میشوند که به هم متصل هستند. اما به طور کلی هر کانال میتواند بدون اتصال به دیگری و به صورت مستقل کار خود را به درستی انجام دهد. همچنین خروجیهای فدک نیز دوتایی هستند که این سیگنالهای خروجی به نقاط مورد نظر ارسال میشوند و کانالهای دیگر محاسبات مورد نیاز آن را انجام میدهند.
بیشتر ارتباطات بین سیستم هواپیما و ECU از طریق دادههای دیجیتال است. به علاوه بعضی از دادهها از طریق کابلها به صورت مستقیم بین سیستم هواپیما و ECU منتقل میشوند. سیستم ECU مجهز به تست تجهیزات درونی (Built-In Test Equipment - BITE) است که اطلاعات تعمیر و نگهداری و قابلیت تست از طریق MCDU را داراست.
ECU توانایی شناسایی و جدا کردن خطاها از طریق سیستم BITE را دارد. این سیستم به ECU این اجازه را میدهد که در صورت نیاز عملکرد موتور را از یک کانال خراب به کانال دیگر که سالم است انتقال دهد. اگر یک کانال دچار خطا شود و آن کانال نتواند فعالیتهای موتور را به صورت مناسب کنترل کند، آن جز از موتور که کنترل مناسبی را نداشته است به حالت ایمن از خطا (safe mode) میرود. برای مثال اگر یک کانال برای کنترل دریچه متغیر هوای فشرده (VBV) دچار اشکال شود و کانال دیگر نتواند حالت باز یا بستهی دریچه را تشخیص دهد و در نهایت نتواند آن را کنترل کند، خود دریچه در حالت ایمن از خطا به صورت پیش فرض در حالت باز قرار میگیرد تا سیستم کلی موتور دچار اشکال نشود چرا که اگر در حالت بسته قرار گیرد ممکن است از تجمع هوای فشرده کارایی موتور دچار اشکال شود.







ارسال نظر